- Project title: Design of a quadruped robot for research and teaching
- Budget: 1500 USD
- Project executive: Ba-Phuc Huynh
Design a compact quadruped robot that includes the following features:
- The CAD includes parts that can be produced on a 3D printer.
- The weight is less than or equal to three kilograms and has a one-kilogram load capacity.
- Essential motions of a quadruped robot: walking forward/backward, running, turning left/right,...
- The robot legs have 3 degrees of freedom structure.
- Dynamic balancing system.
- Support map building, navigation planning, and dynamic obstacle avoidance using a high precision LiDAR and other sensors like ultrasonic or IR sensors.
- Robot operating system (firmware) is scalable for future bigger quadruped robots.
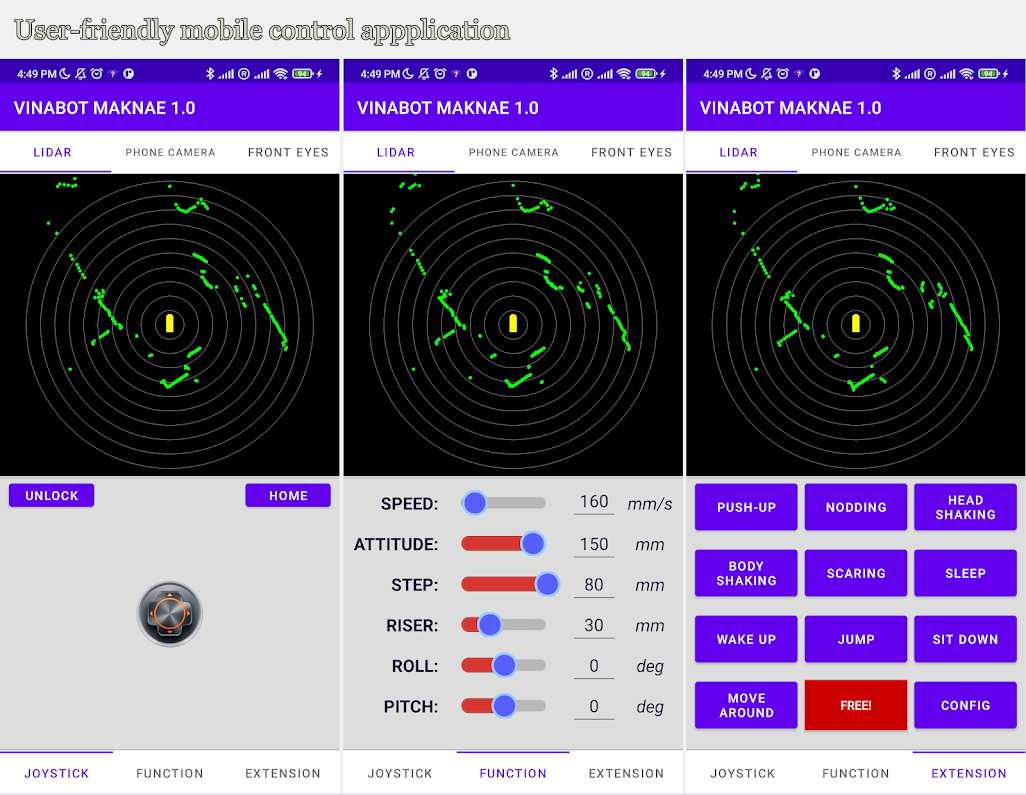
- A robot control SDK can easily embed experimental control theory and algorithms for research and teaching purposes.
- Control software running on desktop and mobile devices.


The dynamic dual algorithm supports the robot balanced on varied terrains. It is integrated into the motion control, so the robot can properly adjust the balanced posture smoothly during the movement.



This side-project was implemented in three months. Although made at a limited cost, this project serves as an illustration of a full robotic design process. Control algorithms are made to be easily scalable to larger robots. By integrating the essential features of a quadruped robot and locomotion control, it can be employed in research and teaching. This project gives me many experiences to design a new larger and more versatile quadruped robot, which is expected to be completed this year.
- Brother SPOT, Boston Dynamics.
- Brother MINI CHEETAH, MIT.
- Sister Go1, Unitree Robotics.